
Recent discussion with one of OSM contributors, who edited a forest path, located at narrow straight cutline, crossing pretty dense forest, made me thinking about some good example of how bad tracks can get under the foliage. Since that person used Strava’s point cloud, I decided that it would be perfect example.
Let’s take a look at this place. It’s a clearing for high voltage power line, about 85 meters wide. There is a mixed use pedestrian/bicycle asphalt road (former service road), about 6 meters wide, it goes from south to north. There is another road of similar type and size, which goes to the east. Forest there is mixed (about 40% firs), old grown, about 19 meters tall.
Then, let’s take a look at Strava data overlaid on top of high resolution imagery (click on it for original resolution):
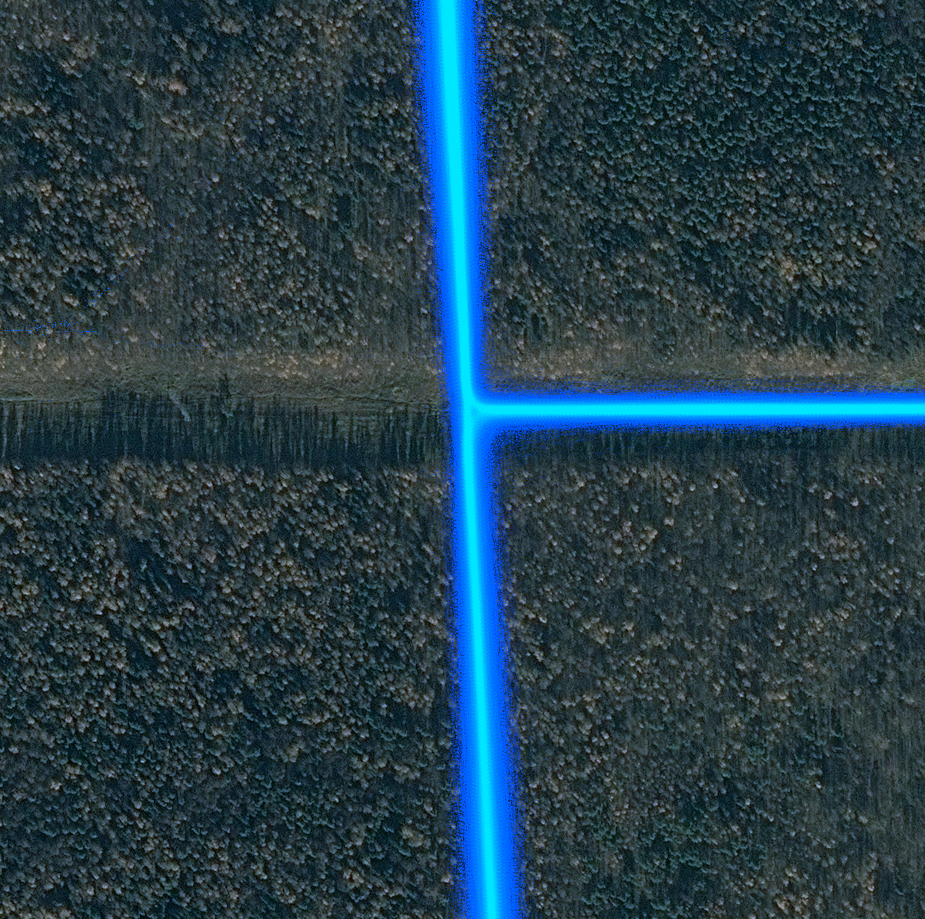
- Point cloud is quite dense there, and highest density portion width stays about 5.5..6 meters regardless of foliage cover.
- Width of corridor, fully covered with points (at least one point each 0.5 m) is about 25 meters with clear sky view and about 33 meters under the foliage.
- Width of full spread corridor is about 45 meters with clear sky and about 85 meters under the foliage.
Spread width does not change immediately, when road goes under the foliage. It’s caused by Kalman filter, used in every consumer GPS receiver to reduce random jumps to the sides from user’s course line (which improves only appearance, but not quality of data, since it’s based on assumption, that receiver moves more along more or less straight/smooth trajectory).
I don’t know, how exactly Strava calculates the color of each pixel for their point cloud layer, but if it’s just some simple additive method with clipping, highest density area will only grow in time. And it’s only a coincidence, that currently its with equals to real width of these roads.
Since all tracks in point cloud are independent, it doesn’t make any sense to say, that averaging improves precision (width of corridor). It actually even makes it worse, because more awful tracks piling up there in time. However, accuracy (distance between corridor median line and road median line) grows until certain “saturation point”. At least, until full coverage (when each point of layer contains at least one point at highest resolution) within visible corridor will be reached.
What should we learn from it?
Random tracks, even several tens of them, can’t be completely reliable under the foliage, especially since foliage density is different, and certain areas may affect GPS reception systematically (cause similar direction of jumps). Foliage potentially increases spread from about 10 meters to each side to 20 meters.
Is this value large? If you don’t have any other data there - no, it’s okay - there are roads in OSM, traced from Landsat imagery. If you’re trying to improve accuracy of paths, traced by any sources, better than Landsat imagery - you probably shouldn’t do that, GPS tracks are not enough accurate to give any improvement, even in case of accumulated sets of tracks.
Discussion