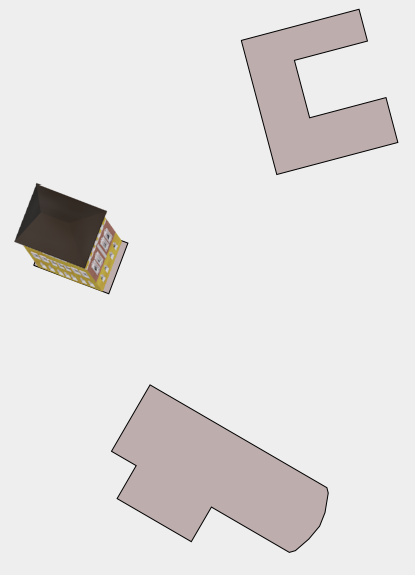
Visualizing the facade visibility from neighbor streets
Posted by vvoovv on 26 April 2021 in English.
We implemented the visualization of the facade visibility from neighbor streets within the Blender-OSM project. Green color on the image: facade is totally visible, red: facade is invisible, black: shared building wall. The other colors are used for in-between visibility states.
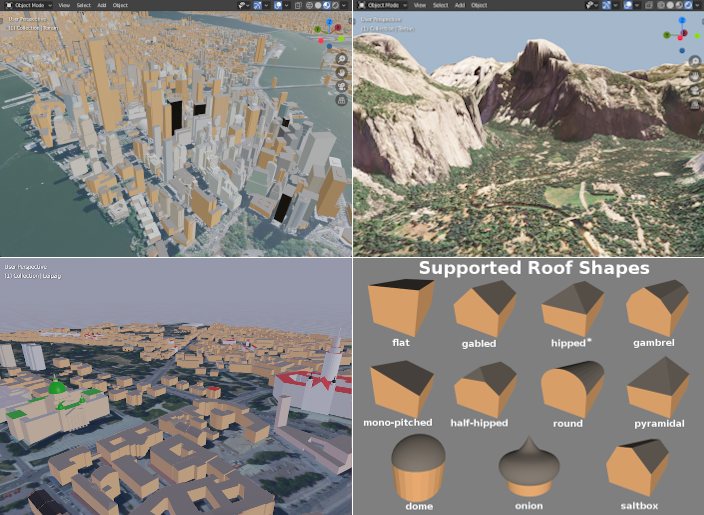
Blender-OSM is an open-source addon for Blender that creates city environments out of OpenStreetMap data. The addon source code is hosted on Github: the development version, the release version. To fund the addon development a version with assets is sold at https://gumroad.com/l/blosm
The visualization of the facade visibility from the neighbor streets is possible without even installing Blender.
Installation
- Download the addon code base from here
- Unpack it
- Rename the top folder from blosm-facade_visibility_demo to blosm
- Install some common Python packages:
- pip install scipy
- pip install mathutils
- pip install matplotlib
Usage
To visualize facade visibility for a local OpenStreetMap file:
cd /path/to/blosm
python -m script.command_line --buildings --highways --setupScript setup/mpl_facade_visibility.py --osmFilepath /path/to/your/file.osm
To visualize facade visibility for OpenStreetMap data from the server:
cd /path/to/blosm
python -m script.command_line --buildings --highways --setupScript setup/mpl_facade_visibility.py --osmDir /path/to/folder/for/downloaded/osm/data --coords 13.42697,52.51586,13.44132,52.52046
Replace coordinates after the –coords flag with coordinates of your area. The format of the coordinates is min_longitude,min_latitude,max_longitude,max_latitude
{kind=link}
{kind=link}