
Indoors at Wherecamp Berlin 2016
Posted by SimonPoole on 21 November 2016 in English. Last updated on 14 December 2016.Two weeks back I was invited to Wherecamp Berlin, on the one hand to participate in the opening panel and on the other to have a short talk on the state of indoor mapping, more about that later.
Naturally the foreseeable impact of self-driving vehicles and machine learning in general was the, obvious, main topic of the opening panel. But outside of “things are going to change” I’m not sure that there was any other conclusion from a couple of oldish men without crystal balls.
From an OpenStreetMap point of view it was encouraging to see so many OSM based projects and operations presenting at the event mingling with essentially all the big names in geo-business.
 Stefan from GraphHopper presenting at Wherecamp Berlin.
Stefan from GraphHopper presenting at Wherecamp Berlin.
From a bit of a nerdy view, the first day presentations from Qualcomm, Broadcom and Google on what we will likely be getting in the way of GNSS support in upcoming mobile phones was quite interesting.
At the conference the first phone (the Aquaris X5 Plus) officially supporting the Galileo system was presented together with hackathon arranged around it. I didn’t get to actually testing one, so no further comment on if it actually worked and if there was any noticeable improvement. This seemed to be part of a marketing campaign that will lead up to Galileo being declared operational this December if all goes well. This probably doesn’t really mean much from a practical point of view as the number of working and commissioned satellites will still be rather low, but it probably does indicate that Galileo is slowly becoming real.
Qualcomm however did announce in their talk that all phones based on a current Snapdragon processor should support Galileo, naturally likely needing a corresponding firmware upgrade first. Slightly humorous was numerous of the presenters referring to the Samsung Galaxy S7 as an example of such a phone, even though in Europe the S7 uses a Samsung Exynos processor (which however, even though not documented, I suspect will support Galileo too).
Perhaps the most interesting talk in the series was from Broadcom on their project to develop a dual frequency consumer grade GPS chip. Dual frequency GPS chips have up to now been the domain of survey equipment manufacturers and the military. Naturally it is questionable if this technology will actually make its way in to real consumer devices, but if it does, we will get significant better GPS data without resorting to using DGPS with external reference stations.
This brings us to the last of the three GPS related topics: as you may have heard google will be supporting receiving “raw GPS data” from your mobile phones chip set (if it supports in the 1st place) from Android Nougat on. This implies that you could use your phone as a “rover” in a typical RTK setup or simply post process GPS data for better results. But this really all only makes sense if you have access to reference data and if google is going to provide something in the way of that is currently completely unclear.
Indoor
Besides inviting me to the opening panel, the organizers had twisted my arm a bit to participate in the afternoon session on indoor mapping in OSM. Background: slightly over two years back I was involved in the effort to devise a reasonably consistent and simple tagging scheme (see: https://forum.openstreetmap.org/viewtopic.php?id=25961 ) to replace the previous IndoorOSM tagging that was a bit popular at the time, but had a couple of technical problems and was in general rather complicated. The result of that work is SIT, but when we were working on the scheme we had one big problem: we really didn’t have any working code and only a small number of examples to work with and so when we finished the first version of the specification in 2014 it was not really clear if everything we had designed would work.
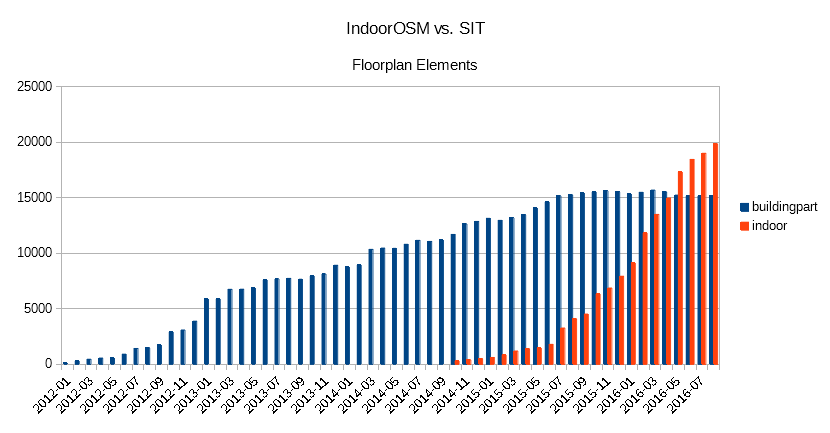 Floor plan elements in OSM, IndoorOSM blue vs. SIT red.
Floor plan elements in OSM, IndoorOSM blue vs. SIT red.
Fast forward to 2016, those of you that participated in SOTM 2016 may have seen by the talks by Cynthia Gutton. Antoine Riche and Adrien Pavie on the SNCF mapping 388 french train stations. The tools (among others iD-indoor and openlevelup) developed in parallel and for this project, brought indoor mapping large steps towards being, even if not completely mainstream, something that can be reasonably done in OSM. Antoine and Adrien repeated their SOTM talk in Berlen, and additionally we saw presentations from DB (Deutsche Bahn), Mentz, and OpenStationMap on their mapping of train stations in Germany and elsewhere.
One point that I stressed in my talk at the end of the session, is that while from a number of aspects indoor mapping is a good fit for OSM, for example because we can seamlessly integrate pedestrian and accessibility routing outdoors and indoors, if comes at the cost of extreme amounts of details that make editing essentially impossible without dedicated editor support. Adrien has already proved that this can be done in a reasonable fashion with iD-indoor, not to be outdone I threw together a proof-of-concept for Vespucci for the conference (in the mean time this has reached a quite stable status).
Berlin main station in Vespucci indoor mode.
In other News
One of the more intriguing presentations on Sunday was from the company TerraLoupe “Aerial large scale landmark detection via deep learning”. While who is actually the contractor remains in the dark, the interesting aspect was using machine learning to identify objects (for example emergency phones), text on street signs etc. along German motorways by using high resolution oblique aerial imagery.
Also of note was the presentation by Holger Dietrich on a version of the Wheelmap app with support for google Tango devices (currently the only such non-developer device is the Lenovo Phab 2 Pro), which allows surveying 3D objects, in the case for Wheelmap for example the width of an entrance and step heights.
Slides from the talks are available from the conference webssite.
Discussion
Comment from BushmanK on 22 November 2016 at 04:27
RTK (or even less demanding high-precision modes) with a typical smartphone antenna, even with a dual-frequency receiver? No way, forget about it.
Are you aware of RTKLib, by the way?
Comment from SimonPoole on 22 November 2016 at 08:54
Yes obviously the antenna seriously limits what you can do with a current smart phone, dual frequency reception however will still give you significant gains compared to single frequency (which is why it really would be the more interesting development).
Naturally I’m aware of RTKLib, vespucci has been able to receive data from an on device RTKLib instance since ages and I’ve used it myself with an external GPS device (USB) and a proper antenna.
Comment from d1g on 26 November 2016 at 18:51
“Vespucci indoor mode” - even in read-only this feature would be useful, thanks in advance!