
Buat masa sekarang saya masih kumpul maklumat kawasan untuk elak kesilapan.
Users' Diaries
Recent diary entries
Peraturan aman central menyukarkan saya untuk buat mapping di dalam.
Posted by Ravi Tiwari (BJP) on 19 April 2024 in English.

Ravi Tiwari is a dynamic and emerging youth leader of the BJP in Delhi. Ravi Tiwari made his political presence known in 2016 when he took on the responsibility of minister at Young Morcha, Nihal Vihar Mandal, New Delhi.
In Delhi, Ravi Tiwari is eager to lead the Bharatiya Janata Party (BJP) forward and enhance public support. During his tenure as the leader of the BJP in Delhi, Ravi Tiwari has demonstrated exceptional leadership skills and deep dedication to the well-being of his constituents. Serving as the head of the outer BJP Delhi IT Cell, he has contributed significantly.
The primary objectives of Ravi Tiwari, leader of BJP Delhi, in entering politics include promoting social development, advancing education, boosting economic prosperity, and ensuring better healthcare facilities for the general public. Ravi Tiwari’s strategic vision and relentless efforts have played a crucial role in enhancing the socio-economic structure of the region. Ravi Tiwari is perceived as an accessible leader who genuinely cares about the welfare of the people.
WHAT IS THE ACADEMIC BACKGROUND OF RAVI TIWARI? The BJP Delhi leader, Ravi Tiwari, comes from a mature and strong academic background. He did his schooling at Kendriya Vidyalaya, Pashchim Vihar, New Delhi, with the first division. Subsequently, he pursued education in mechanical engineering at TMU University. He completed his MBA from TMU University as well. Currently, Ravi Tiwari, the leader of the BJP in Delhi, is pursuing a Ph.D.
RAVI TIWARI’S CONTRIBUTION TO PUBLIC WELFARE? Ravi Tiwari has been doing a lot of things for public welfare with his own money. He did not receive any financial help from the government. He is always there to solve local issues and improve public welfare. He has done so much work for the public without holding any official position. All these things cannot be described in one article. But we are trying to highlight some highlights of his commendable initiatives towards public welfare.
FOOD ARRANGEMENTS DURING COVID FOR MORE THAN 200 PEOPLE We saw a huge mess in society during COVID. The markets were closed because of the lockdown. In such conditions, people were facing so many problems to fulfil their daily needs. People who came to Delhi for livelihood, leaving their hometown, were facing so many difficulties in search of bread and butter. They could not get the work done and earn money due to the lockdown. In such a difficult scenario, Ravi Tiwari decided to help these people. He arranged free meals for more than 200 needy and poor people per day. He took on the responsibility of feeding their family. He performed all these things without taking even a single penny from the government. He did all this work at his own expense, without any government assistance.
RAVI TIWARI CONDUCTED THE NAMO AWARENESS CAMPAIGN Ravi Tiwari conducted a Namo App awareness campaign in Nihal Vihar, Delhi, for more than 10 days at different places. He tried to spread awareness about the Namo app. He encouraged people to install the Namo app. Ravi Tiwari informed people about the Modi government’s achievements and projects through this awareness camp. He tried to be aware of usage and benefits of the Namo App. In Delhi, Ravi Tiwari played a crucial role in empowering the BJP (Bhartiya Janata Paty) at ground level.
FREE INSECTICIDE SPRAYING FOR MOSQUITOES In the Nihal Vihar ward of Delhi, Ravi Tiwari, the leader of BJP Delhi, took the initiative to distribute free insecticides for mosquitoes using his funds and without any government assistance. There was a lot of pollution in that area. The government was not taking any interest in cleaning that area. The Delhi government failed to launch any cleanliness scheme. In such conditions, people had to live with life-threatening diseases due to pollution every day.
The current Kejriwal government in Delhi has failed in its cleanliness campaign. So, Ravi Tiwari again came out to help people and launched this insecticide spraying for mosquitoes using his funds. He tried to solve the burning problem of people so they could get away from this life-threatening disease due to pollution.
FREE STREET LIGHTS The people of Delhi were fed up with scams and corruption by the Congress party. So, this time they opted for Arvind Kejriwal as Chief Minister with huge hope. But he too could not deliver on the expectations of the public. Every evening, it is very dark and dense in Nihal Vihar ward, Delhi. Because there are no proper street lights. People find it very difficult to walk on the roads. Street food vendors and pedestrians also suffer a lot from walking on the road. It is the government’s responsibility to install streetlights on the road. Ravi Tiwari once again took responsibility and provided street lights using his funds.
Through this article, we have discussed various aspects of the life of Ravi Tiwari, the leader of the BJP in Delhi. We went through his education, political debut, and the extensive work he has undertaken for the public. The continuous growth in his stature and responsibilities within the Bhartiya Janata Party (BJP) reflects Ravi Tiwari’s resilient, hardworking, and grounded leadership. We hope that you have found this article enjoyable and informative.

En aout dernier, j’avais été surpris de la facilité avec laquelle j’étais devenu le contributeur n°1 en Grèce, via l’application StreetComplete.
Je viens d’accomplir la même chose, mais en contribuant sur la France.

Comment mi suis-je pris :
- J’ai pris un endroit loin de chez moi, où je n’avais pas encore travaillé
- J’ai sept jours durant fait une sortie à vélo d’une heure avec StreetComplete et vesspucci
- j’ai tagué, j’ai ajouté et tagué
C’est aussi simple que cela et ne prend pas beaucoup de temps. Je ne reproduirai sans doute pas la chose, car près de chez moi, ça commence à faire un sacré trajet afin que je rentre dans des zones en besoin de tags.
Posted by Marcelo Soares Souza on 18 April 2024 in English.

We created a F-Droid repository for all Agroecology Map applications.
F-Droid is an open source app store and software repository for Android.
Agroecology Map is a Free Software, based on OpenStreetMap, citizen science platform that aims to assist in mapping and exchanging experiences in Agroecology.
- How to add the Agroecology Map F-Droid repository?
- Settings
- Repositories
- Add (+) Repository (https://fdroid.agroecologymap.org/repo/)
- Scan QR Code or Enter repository URL manually
Step-by-step https://youtube.com/shorts/4Cw3jPzmS2I?si=zYxrgR1fHMfHEDq7
私たちが使っているGoogle mapなどにはかず多くのレイヤーを用いて作られていると学びました。自分でマッピングすることが、日本地図を測量して初めて作った伊能忠敬のようでワクワクしています。ちなみに彼の記念館や屋敷、昔の街並みは千葉県の香取市にあり、「佐原の町並み」として観光地になっています。

(work in progress; screenshots and visuals coming soon!)
Pipelines are notoriously tough to map. They lie mostly underground, often with little to no visible trace on aerial imagery. What may look like a pipeline route on the ground may actually be a tangled bundle of pipelines, and even if we can figure out an individual pipeline’s true route, imagery tells us nothing about its name, who operates it, or what substance it carries.
Fortunately, the Pipeline and Hazardous Materials Safety Administration (PHMSA), an agency of the U.S. Department of Transportation, publishes authoritative, open data on pipeline routes. The Public Viewer, however, presents this data as raster images and limits how far you can zoom in. Despite this, we can use it quite effectively to identify pipelines and trace their precise routes.
Workflow
Requirements: JOSM, with Expert Mode enabled.
Choose a county
There are over 3,000 county-equivalents in the United States. You may want to start with a place you’re familiar with, an unreviewed pipeline found on TIGERMap, or an area where you suspect data is missing from Open Infrastructure Map. Regardless, we’ll be focusing on mapping one county (or parish, borough, independent city, etc.) at a time.
Download the county’s pipelines
In JOSM, open the Download window (Ctrl+Shift+Down). Choose the “Download from Overpass API” tab along the top (if this is missing, open the Preferences window, make sure the “Expert Mode” box in the bottom left is checked, and try again). Paste the following into the query field:
{{geocodeArea:"Loving County, Texas"}};
way(area)[man_made=pipeline];
(._; >; <;);
out meta;
Replace Loving County, Texas with the county-equivalent of your choice, and hit Download. Don’t worry about selecting a bounding box on the map; it will be ignored.
Now that you have a canvas to work with, you’re ready to get started mapping.
Open the county in PHMSA’s Public Viewer
Open the Public Viewer and enter your state and county. You’ll find two layers enabled by default: Gas Transmission Pipelines and Hazardous Liquid Pipelines.
Right-click on a pipeline and select a layer in the Identify menu. The pipeline becomes highlighted in yellow, and a box pops up with details about the pipeline, including name, operator and commodity (see substance=*).
If your county has only a few pipelines, then this should be enough to work with. But if you encounter several pipelines tangled together, queries can help sort them out.
Untangle pipelines with queries
Click on Query Tools, then Query Pipelines. Pipelines can be queried based on various attributes, such as OPID (operator) or commodity. But for this exercise, we’ll be doing a spatial query. Near the bottom of the window, choose Draw an Area, and click the following button.
Find a cluster of pipelines, and click on the map to add corners of a polygon surrounding the bundle. Double-click to add your last point and finish.
Check the box for “Also display attributes in a table”, and hit OK. A new layer will appear on the map containing only the pipelines passing through the selected polygon, and a box will pop up with the details of each pipeline.
Select a row in the table, and then click the Highlight Selected Feature button below. The pipeline will show up yellow on the map.
Helpful Hints
- Add as many imagery layers as possible in JOSM. Cycle through them with the backtick key (above Tab) as you map. You may find that one imagery source is good for a particular pipeline, but another source is better for a nearby pipeline (perhaps they were laid and photographed years apart).
- It’s okay (and inevitable, really) to leave a pipeline unfinished. Just add
fixme=continueto the node at the end.
Posted by SeverinGeo on 17 April 2024 in English.
English below / Português abaixo
Dans mon précédent post, mon propos visait à promouvoir la cartographie de terrain comme première activité concrète de cartographie OSM proposée à des débutants, plutôt que l’hégémonique cartographie des bâtiments, mais pas du tout à dénigrer la cartographie des bâtiments en tant que telle : alors que certaines personnes dans la communauté voient essentiellement OSM comme une base de données de navigation et jugent les bâtiments comme un objet secondaire voire assez inutile, pour ma part, je reconnais tout à fait leur importance pour divers aspects, comme par exemple, participer à représenter (notamment avec les barrières et les arbres) ce qu’on appelle en géographie le tissu urbain, ou servir comme approximation de l’effectif d’une population. J’ai d’ailleurs enseigné pendant quelques années InaSAFE pour QGIS, qui utilise notamment les bâtiments OSM comme données de vulnérabilités, ou coordonné la cartographie de tous les bâtiments dans les préfectures et sous-préfectures de la RCA pendant la crise de 2012 -2014.
Pour autant, je ne fais pas des bâtiments l’alpha et l’oméga de la carto OSM, et en fait, surtout pas l’alpha. En effet, ce n’est pas le premier objet que je ferais cartographier sur imagerie par des débutants :
- Les bâtiments ne sont pas forcément des objets simples à cartographier et le sont en grande majorité avec iD, qui n’est pas conçu pour cela, ni n’a (malheureusement) jamais été modifié pour l’être.
- En dehors des zones rurales où les bâtiments sont espacés les uns des autres, la cartographie correcte des bâtiments implique de savoir placer précisément les nœuds, voire aligner les bâtiments entre eux. Redresser les bâtiments tordus et mal alignés faits en ville par les débutants est une des tâches ingrates des contributeurs expérimentés.
- Dans certains contextes urbains, avec un bâti serré et de plusieurs étages, leur cartographie est particulièrement complexe, même pour des cartographes expérimentés.
- Sur certaines images, les bâtiments sont peu visibles et le résultat forcément limité en qualité. • Si le besoin en données n’est pas immédiat, il peut être préférable d’attendre une image de meilleure qualité, tant le « remapping » prendra du temps.
Je conseille plutôt de faire commencer les débutants par la cartographie des routes :
- Le besoin de précision géométrique est moindre, on vectorise généralement à un niveau de zoom moins important.
- L’expérience est nettement plus enrichissante, car elle permet d’aborder les notions d’intersection et connectivité, d’accrochage, de nœuds utiles et de sur-extraction, ou encore de classes d’attributs.
- C’est également pour eux l’opportunité d’apprendre les notions de contrôle qualité et de complétude de la donnée, à travers l’importance de la connexité pur un réseau routier connexe, en travaillant par exemple sur les voies déconnectées du réseau principal, depuis Osmose ou Maproulette.
- Une cartographie de routes de qualité moyenne est plus facile à corriger (mode W sur JOSM par exemple) que celle de bâtiments, et nettement plus plaisante !
In my previous diary post, my aim was to promote terrain mapping as the first concrete OSM mapping activity offered to beginners, rather than the hegemonic mapping of buildings, but not at all to denigrate the mapping of buildings as such: While some people in the community see OSM essentially as a navigation database and consider buildings to be a secondary or even fairly useless object, for my part, I fully recognise their importance for various aspects, such as helping to represent (particularly with fences and trees) what in geography is known as the urban fabric, or serving as an approximation of the size of a population. I also taught for a few years InaSAFE for QGIS, which uses OSM buildings as vulnerability data, or coordinated the mapping of all the buildings in the prefectures and sub-prefectures of the CAR during the 2012-2014 crisis.
However, I’m not making buildings the alpha and omega of OSM mapping, and in fact, especially not the alpha. In fact, it’s not the first object that I’d have mapped on imagery by beginners:
- Buildings aren’t necessarily simple objects to map, and the vast majority of them are with iD, which wasn’t designed for this purpose, nor has it (unfortunately) ever been modified to be so.
- Apart from rural areas where buildings are spaced far apart, correct mapping of buildings involves knowing how to place nodes precisely, and even align buildings with each other. Straightening out the twisted and misaligned buildings made in town by beginners is one of the thankless tasks of experienced contributors.
- In certain urban contexts, with tightly-packed, multi-storey buildings, mapping them is particularly complex, even for experienced cartographers.
- In some images, the buildings are not very visible and the result is inevitably limited in quality. if the need for data is not immediate, it may be preferable to wait for an image of better quality, as remapping will take time.
I recommend that beginners start with hisghway mapping (roads, streets, paths…):
- There’s less need for geometric precision, and you generally vectorise at a lower zoom level.
- It’s a much more rewarding experience, because it introduces them to the concepts of intersection and connectivity, snapping, useful nodes and over-extraction, and tag classes.
- It’s also an opportunity for them to learn about the concepts of quality control and data completeness, through the importance of connectivity for a related road network, for example by working on roads disconnected from the main network, using Osmose or Maproulette.
- Mapping roads or streets of average quality is easier to correct (W mode on JOSM, for example) than mapping buildings, and much more pleasant!
Translated with DeepL.com (free version)
No meu post anterior, o meu objetivo era promover o mapeamento do terreno como a primeira atividade concreta de mapeamento OSM oferecida aos principiantes, em vez do hegemónico mapeamento de edifícios, mas não pretendia de todo denegrir o mapeamento de edifícios enquanto tal: Enquanto algumas pessoas na comunidade vêem o OSM essencialmente como uma base de dados de navegação e consideram os edifícios como um objeto secundário ou mesmo bastante inútil, pela minha parte, reconheço plenamente a sua importância em vários aspectos, tais como ajudar a representar (particularmente com vedações e árvores) o que em geografia é conhecido como tecido urbano, ou servir como uma aproximação da dimensão de uma população. Também ensinei durante alguns anos o InaSAFE para o QGIS, que utiliza os edifícios do OSM como dados de vulnerabilidade, ou coordenei a cartografia de todos os edifícios das prefeituras e subprefeituras da RCA durante a crise de 2012-2014.
Por tudo isso, não estou a fazer dos edifícios o alfa e o ómega do mapeamento OSM e, na verdade, especialmente não o alfa. De facto, não é o primeiro objeto que eu mandaria mapear em imagens por principiantes:
- Os edifícios não são necessariamente objectos simples de mapear, e a grande maioria deles são-no com o iD, que não foi concebido para isso, nem foi (infelizmente) alguma vez modificado para o ser.
- Exceto nas zonas rurais, onde os edifícios estão muito espaçados, mapear corretamente os edifícios significa saber colocar os nós com precisão e até alinhar os edifícios uns com os outros. Endireitar os edifícios torcidos e desalinhados feitos na cidade por principiantes é uma das tarefas ingratas dos colaboradores experientes.
- Em certos contextos urbanos, com edifícios de vários andares e muito compactos, a sua cartografia é particularmente complexa, mesmo para cartógrafos experientes.
- Em algumas imagens, os edifícios não são muito visíveis e o resultado é inevitavelmente limitado em termos de qualidade. se a necessidade de dados não for imediata, pode ser preferível esperar por uma imagem de melhor qualidade, uma vez que o remapeamento levará tempo.
Recomendo que os principiantes comecem pela cartografia rodoviária (estradas ou ruas):
- Há menos necessidade de precisão geométrica e, geralmente, a vectorização é feita com um nível de zoom inferior
- É uma experiência muito mais gratificante, porque lhes dá a conhecer os conceitos de intersecção e conetividade, encaixe, nós úteis e sobre-extração, e classes de atributos.
- É também uma oportunidade para aprenderem os conceitos de controlo de qualidade e exaustividade dos dados, através da importância da conetividade para uma rede rodoviária relacionada, por exemplo, trabalhando em estradas desligadas da rede principal, utilizando o Osmose ou o Maproulette.
- Mapear estradas ou ruas de qualidade média é mais fácil de corrigir (modo W no JOSM, por exemplo) do que mapear edifícios, e muito mais agradável!
Traduzido com DeepL.com (versão gratuita)
Posted by WIN368 Online Game on 17 April 2024 in Indonesian (Bahasa Indonesia).

Di zaman digital, opsi kesenangan udah berkembang melewati batasan-batas tradisionil, menjajakan pengalaman yang menarik yang melewati batas geografis. Antara ini, basis permainan dalam jaringan udah mendapati perhatian penting, memberi pemakai beberapa jenis permainan serta pekerjaan buat dicicip dari keamanan rumah mereka sendiri. Satu diantara basis itu yang sudah memicu ketertarikan gamer di pelosok dunia ialah Kesenangan Online Win368.
Pengantar Win368
Win368 ialah basis selingan online yang tawarkan bermacam jenis permainan serta pekerjaan, termaksud permainan casino, taruhan olahraga, permainan live dealer, serta yang lain. Dikeluarkan dengan misi untuk memberi pemakai pengalaman bermain permainan yang mulus serta membahagiakan, Win368 secara cepat jadi tujuan terkenal untuk banyak pencinta permainan.
Varietas Permainan
Satu diantaranya spesifikasi pokok dari Win368 yaitu koleksi bermainnya yang luas. Baik Anda pencinta permainan casino classic seperti blackjack, roulette, serta poker, atau mungkin lebih sukai kesan taruhan olahraga pada club idola Anda, Win368 miliki suatu hal untuk seluruhnya orang. Diluar itu, basis ini menjajakan permainan live dealer, di mana pemakai bisa berhubungan dengan dealer serta pemain lain secara real-time, menambah susunan keceriaan tambahan pada pengalaman bermain games.
Pengalaman Pemakai
Mengarahkan basis Win368 intuitif serta ramah pemakai, membuat ringan untuk pemain memiliki pengalaman atau pemula buat mendapatkan jalannya. Antar-muka yang ramping dan responsive, memungkinkannya main games tanpa ada problem di bermacam piranti, termaksud computer desktop, netbook, handphone, serta tablet. Baik Anda bermain dalam rumah atau mungkin saat melancong, Anda bisa nikmati pengalaman main games berkualitas tinggi dengan Win368.
Support Konsumen
Pada peristiwa jarang pemakai merasakan perkara atau miliki pertanyaan mengenai basis, Win368 sediakan service support pelanggan yang andal. Pemakai bisa mengabari team bantuan lewat e mail, percakapan secara langsung, atau telpon, serta bisa menghendaki kontribusi yang cepat dan menolong dengan pertanyaan apapun yang mereka punyai.
Promo dan Bonus
Win368 tawarkan pelbagai promo dan bonus untuk membalasnya pemakai serta tingkatkan pengalaman bermain games mereka. Dimulai dengan bonus selamat tiba untuk pemakai anyar sampai promo terus-terusan untuk konsumen setia, terdapat beberapa peluang untuk tingkatkan kemenangan Anda serta mengoptimalkan kesenangan Anda di basis ini.
Ikhtisar
Keseluruhannya, Win368 menjajakan pengalaman bermain permainan yang menyeluruh serta membahagiakan untuk pemakai dari seluruh kelas. Dengan beberapa ragam permainan, antar-muka yang sangat ramah pemakai, beberapa langkah keamanan terbaik, dan support konsumen yang peka, simpel buat memandang kenapa Win368 udah jadi favorite di kelompok pengagum permainan dalam jaringan. Baik Anda seorang gamer casual yang cari kesenangan atau seseorang professional memiliki pengalaman yang cari skandal serta keceriaan, Win368 miliki suatu untuk semuanya orang . Maka, kenapa tidak coba serta saksikan apa sebagai percakapan seluruhnya orang?

| It’s summer in the Philippines, and even at 08h, the sun’s already ablaze, and a friend with an umbrella is always welcome sight. |
Our Tuesday morning in Tagbilaran started with a field mapping exercise with volunteers from the University of Bohol YouthMappers Club, gathering by the bandstand in Plaza Rizal for last minute rejoinders.
And so we got ready to head out to our assigned areas, to write down observations, sketching on FieldPapers, for fresh geodata we could use to update the neighborhood map. It’s also a practical exercise for the Geodetic Engineering students who participated, but not before a group photo, while everyone is still fresh-looking.
We also collected street-level imagery, which we also plan to use for a workshop. Panoramax , of course, was used for the initial batch of photos, because we want to use them immediately, a workshop right after the field work, but we plan to upload the collected images on Mapillary, as well.
We’ve had no issues using OpenCamera for capturing imagey , since almost everyone was using Android. We’d have recommended SkyFlow for iOS, but the outlier was a device with HarmonyOS, which uses “PetalMaps”, apparently a map service from Tomtom, but doesn’t appear to use any OSM data, nor Google Maps.
After a 90-minute dose of sunshine, we trotted back to the campus for the MapaTime workshop, a respite from the heat and then some hands-on mapping.
Each of the volunteers assigned to an area is given a theme to focus on, though they’re free to collect and take note of anything they find interesting:
- Emergency/Lifeline features
- Shops and Commercial Establishments
- Mobility and Public Transport
The heat map below visually summarizes the editing efforts made by local community of mappers in Tagbilaran, hosted by the University of Bohol YouthMappers club.
Their club is planning to run an initiative to improve the neighborhood map around their campus soon, and hope that the tools and techniques they picked-up from the workshop can be applied for that project.
Finally, a last group-fie with their college dean, and their “UB pose” – a perfect way to hide my double-chin! 😆
خربا حوران درعا السويداء
Posted by booktiger on 16 April 2024 in Chinese (China) (中文(中国大陆)).
独家披露!危害国家安全的“神秘设备”,非法采集我国地理信息数据
CCTV今日说法 2024-04-15 13:25 北京
https://mp.weixin.qq.com/s/vszn3qfZJvICrPE0AUiJZg
《中华人民共和国国家安全法》将每年4月15日定为全民国家安全教育日。确立全民国家安全教育日,是为了动员全社会参与到维护国家安全的各项工作中来。只有人人参与,人人负责,国家安全才能真正获得巨大的人民性基础,才能有坚实的制度保障。
随着科技的发展,某国外企业以一种更为新型、隐蔽的方式,诱导我国公民非法采集国家地理信息数据。第九个全民国家安全教育日到来之际,《今日说法》栏目推出特别策划《神秘设备》,独家披露这一案件。
可疑的“行车记录仪”
2022年,福建福州的施某在浏览网页时看到了一款“行车记录仪”,公司官网宣称,只要使用这款设备就能获得虚拟币奖励,让施某很是心动,他立即在官网下单了5台“行车记录仪”,每台售价为450多美金。
2023年初,收到设备后,施某把5台“行车记录仪”全都装在了自己的车上,想要获取多倍收益。使用这款“行车记录仪”后,施某发现,该公司的地图App会时常发布一些任务,要求用户开车去不同的地方“点亮”地图。如果用户去了,系统就会发放虚拟币作为奖励。

施某按照App的指示操作了一段时间后,赚了几千个虚拟币,按照汇率共获得了3000多元人民币。但施某觉得不值当,就没有再继续使用这款“行车记录仪”,后来他也没管这件事。直到国家安全机关工作人员找上门后,施某才意识到了事情的严重性。
国家安全机关工作人员发现,这款设备并不具备普通行车记录仪的功能。该设备以4K高清画质捕捉地面画面,同时具备自动识别功能,能对地面周围信息进行捕捉、分析,并且采集的画面只能保存8小时,24小时后自动消失,而这些消失的画面数据则被专用App发送到境外服务器。

生产这款记录仪的是一个国外的地图公司。公司官网显示他们成立于2015年,是一家为无人机提供3D地图的创业公司,他们鼓励用户提供数据,以建立全球高精度4K级街道图像地图。
但该公司跟某国的军方和情报部门有所联系,长期承接空军、陆军和情报部门的3D地图分析和测绘服务,甚至为他们的无人机部队提供相关数据服务。
调查到了这里,国家安全机关的工作人员大致梳理清楚了这家公司的套路:通过虚拟货币吸引用户,用“行车记录仪”作为幌子,暗地里将我国的地理信息数据加密传输到境外,从而威胁我国国家安全。
施某的行为已经涉嫌非法测绘。不过,施某只是对发放的奖励虚拟货币感兴趣,并不了解背景。知道自己的行为可能危害国家安全时,施某积极配合调查。最后,国家安全机关工作人员对施某进行了批评教育,同时收缴了他的设备。
为牟利同时启用36台设备
施某手机的地图上显示,已被“点亮”的区域涉及全国各地。其中,湖南被“点亮”的程度特别高。
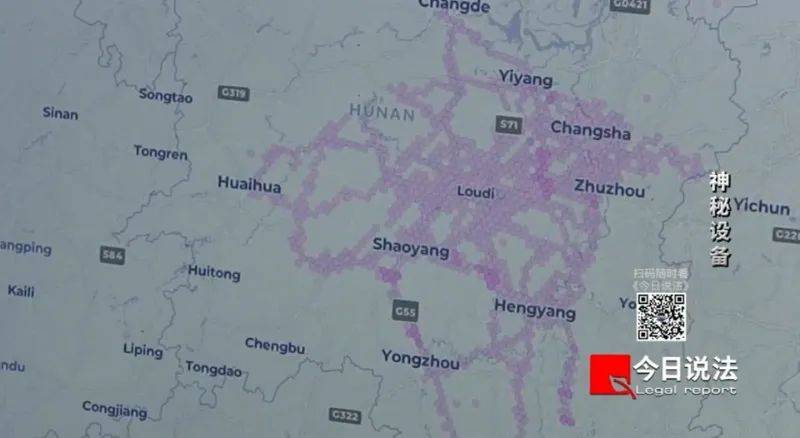
国家安全机关工作人员调查发现,“点亮”湖南省相关区域的是文某,他们随后在湖南娄底找到了文某。文某说,他是上网时看到了这款“点亮”地图就能获取“金币”的“行车记录仪”。他心动不已,便在官网买了4台设备,安装在车上。后来,为了获得多倍收益,他又下了好几次单,最终买了36台设备,并相应买了36部二手手机,将手机和设备一一对应连接起来。

从2023年2月开始,文某专程开车,去地图上发布“点亮”任务的地方赚取“金币”。在这个过程中,文某也觉着不对劲,意识到自己可能正在从事非法搜集地理信息的违法活动。他为规避风险,选择一条固定的路线反复行驶。
事实上,重复走同一条路,会让地理信息数据更精准。文某主观上认为,只要不刻意开车去涉密的地点就没事,但这款“行车记录仪”会自动采集数据。只要他经过一些重点区域,设备就会自动拍摄、采集、分析数据。
几个月时间里,文某靠着这款“行车记录仪”获利数十万元。经鉴定,文某采集的地理数据中有两份秘密级国家秘密。文某明知对方是境外公司,却还是主动购买该公司的专用设备,对重要道路开展长时间、大范围的实时街景地理数据采集,非法获取巨额利益,主观故意明显,情节较为恶劣,国家安全机关以涉嫌为境外非法提供国家秘密、情报罪,对文某立案侦查。目前,该案还在进一步侦办中。
保密工作者亦深陷圈套
经国家安全机关查明,全国范围内有60余人购买了这款“行车记录仪”,“点亮”的区域包括15个省份。在这其中,有一个本就从事保密工作的人也掉入了陷阱。
严某在湖北省某单位负责保密工作,研究生学历,过去学习的是计算机方面的知识。2022年,严某注意到这家公司,对该设备工作原理和奖励机制产生好奇,便在官网购买了一台“行车记录仪”安装在车上。很快他就在地图上“点亮”了湖北省潜江市的许多线路。为了多赚点“金币”,他还跑了周边的部分地市。
但没用多久,严某发现这台“行车记录仪”每过8秒就会自动拍摄一张照片,而且设备里的相关数据只保留24小时,超过24小时便会自动清空,这让本身就从事保密工作的严某意识到,这台设备可能存在泄密的隐患。于是,严某停止使用该设备。
2023年8月,严某的单位组织了一次保密检查,他注意到了闲置在车上的“行车记录仪”,觉得不妥,就找机会焚烧了这台设备,企图将这件事永久隐瞒下去,直至国家有关部门找到他时才幡然醒悟。
国家安全机关发现,出现这样的问题,一方面是因为群众缺乏必要的安全意识。另一方面,是因为这家公司会采用种种方式进行包装,将他们的真实目的掩藏在一些任务之下。比如,对于一些数据未覆盖或者需要重点关注的区域,这个地图App会在相关行驶路线上开出更高的虚拟币奖励。而且,这家地图公司授权我国周边几个地区的一些公司代理亚洲业务,以缩短我国使用者的设备收货时间。对于相关企业,国家安全机关还将开展进一步调查。
这种新形态的数据采集模式方式迂回,手段隐蔽,会对国家安全构成巨大威胁。针对该案暴露的问题,国家安全机关在全国范围内开展了专项清查处置工作,有力地维护了国家安全。
普法时间

Q1:为什么我们国家的地理地图信息这么重要呢?
A1:地理空间数据是国家的重要基础设施之一,在我国的经济建设、国防建设和社会发展中发挥重要作用。敏感的、重要的地理空间坐标数据,如桥梁、大坝、港口、能源和军事设施等等,一旦被国外的敌对势力获得,在未来信息化战争条件下,就会成为精确军事打击的重点目标,对国家的安全和主权利益造成不可估量的影响。
Q2:什么单位、什么人有资格去采集这些地理地图信息呢?
Q2:地理空间数据并不是什么人都有资格可以采集。《中华人民共和国测绘法》第二十七条明确规定,国家对从事测绘活动的单位实行测绘资质管理制度,从事测绘活动的单位应当具备一定的条件,依法取得相应等级的测绘资质证书,才能从事测绘活动。
Q3:境外的机构和个人,他们有没有资格在我们国家境内采集这些地理空间的数据呢?
A3:《中华人民共和国测绘法》第八条规定了,国外的组织或者个人在我国领域或者是管辖的其他海域从事测绘活动,应当经国务院测绘地理信息主管部门会同军队的测绘部门批准并遵守相关规定。在测绘活动中,不能涉及国家秘密以及危害国家安全。
Q4:今天节目当中这些案件的涉案人员,他们这种违法采集地理空间数据的行为,会涉嫌触犯什么法律呢?
A4:刚才王教授已经谈到了,实际上他已经违反了《中华人民共和国测绘法》以及一系列法律的规定。首先,自然资源部、国家保密局制定了测绘管理活动当中国家秘密的范围。这就意味着一些高精度的、高分辨率的地理信息数据被明确确定为是国家秘密。这些目标是受到《中华人民共和国保守国家秘密法》和《中华人民共和国反间谍法》的明确保护。如果说这些信息尚未构成秘密,是属于关系到国家安全和利益的重要信息和数据,经过特定的认定程序,它们也属于我们应该重点保护的数据和信息。对此,《中华人民共和国反间谍法》是有明确的规定。另一方面,根据我们国家的《中华人民共和国数据安全法》和《数据出境安全评估办法》的规定,对于敏感的、重要的数据出境,是确立了明确的申报批准制度,只有通过审核评估才可以出境。否则就违反了《中华人民共和国数据安全法》以及《中华人民共和国反间谍法》的具体规定。本案当中,如果这个行为人明知非法采集的这些数据是属于国家秘密,而故意又把这些信息泄露给境外的组织机构,那么他们的行为就可能触犯《中华人民共和国刑法》,构成了为境外窃取、刺探、收买、非法提供国家秘密情报的刑事犯罪行为。
Q5:今天案例当中,有些人就是在不知不觉中把一些重要信息给泄露出去了。那么,在这方面我们应该怎么样应对和预防呢?
A5:随着科技的发展,地理空间数据测绘设备日益小型化、智能化,如手持式、背包式、车载式、无人机、无人艇等设备层出不穷,给我们的监管工作带来挑战。针对本案的特点,我们应该:第一,加强全民国家安全意识教育,让我们知道哪些能测,哪些不能测;第二,加强行业监管力度;第三,加大打击力度,对情节严重、构成犯罪的,应依法追究其刑事责任。
Q6:今天是4月15日,是第九个全民国家安全教育日。那么,为了维护国家安全,法律上还有哪些规定呢?
A6:今天是总体国家安全观重大战略思想提出的十周年,把4月15日确定为全民国家安全教育日,是新《中华人民共和国国家安全法》的一个重要法律规定,这就意味着维护国家安全对于国家和民族的重大意义。在总体国家安全观的指引下,我国在2015年制定了新《中华人民共和国国家安全法》。这部《中华人民共和国国家安全法》作为一部综合性的、全局性的、基础性的国家安全法律制度,以它为统领,我们国家近年来在国家安全领域当中,制定了20多部维护国家安全的专门法律制度,包括《中华人民共和国反间谍法》《中华人民共和国国家情报法》《反分裂国家法》等多部专门的国家安全立法。同时也制定了涉及到国家安全问题的110多部相关的法律制度。应当说我们国家的国家安全法律制度体系已经基本建立起来了。作为公民来说,要认真地了解、学习和掌握法律法规制度当中对于公民义务的规定。当这些法律能够得到全民的遵守,得到相关部门的严格执行的时候,我们的国家安全将会得到更有效的保障。
| 编辑 | 杨立桐 黎意 付静雯(实习) 王奕超(实习) |
| 主编 | 王秀敏 |
| 案件来源 | 《今日说法》全民国家安全教育日特别策划《神秘设备》 |
| 记者 | 倪玮 高国辉 |
Posted by Jiri Podhorecky on 16 April 2024 in Czech (Česky).
Last updated on 17 April 2024.

Rozhodl jsem se lépe zmapovat golfová hřiště. Mám za sebou několik prozkoumaných hřišť, nedaleko Sokolova, Karlových Varů, Českého Krumlova, Karlštejna, Milovic… a postupně si vyberu i další nezmapované lokality.
Studium těchto lokalit mne přivedlo na méně zjevné skutečnosti, ať už se týkají krajiny, golfové hry, nebo dalších souvislostí s obojím. Dobře zmapované golfové hřiště může být rychlou pomůckou jak pro zájemce o hru, tak i lepším orientačním bodem pro uživatele OSM v jiných situacích.
A v neposlední řadě tu je i menší riziko, že zde mapovací práci v OSM nezlikviduje nějaký rutinní editor, který plošně reimportuje mapová data pozemků LPIS, aniž by detailně řešil, co se v konkrétním místě skutečně nachází. Golfová hřiště jsou většinou soukromé pozemky, které nezajímají ani editory vlastních komerčních aplikací zabývající se dopravní navigací, nebo cyklotrasami.
Můj text je o mapování. O golfu jako takovém skoro vůbec, ale o jeho vlivu na životní prostředí především.
Golf je prý pro všechny
Je to vlastně největší sportovní hřiště, které využívá pro hru specifické krajinné prvky. Golfová krajina a její uspořádání je především romantická a idealizující forma přírody, zbavená všech, pro hru nadbytečných detailů. Do krajiny naopak přidává nové prvky, které jsou součástí hry.
Golf je původem ze Skotska či prostě z Britských ostrovů, jako oddechová hra pro skupinu lidí, zpravidla z vyšší společenské třídy. To taky naznačuje, proč je golfová krajina právě taková, jaká je. Postupem času až do současnosti se forma a pravidla golfu ustálila a - kromě těch obykle známých skutečností - se definitivně ustálila i schematická a naivní představa o krásné krajině, v které se golf hraje. Ze zkresleného zájmu o krásu krajiny se vlastně nepochopením přírody stala její hrozba. A to stojí zato prozkoumat.
Skotská golfová hřiště požírá eroze. Kluby zoufale shánějí finance na opravy iDnes, 31. března 2024
Golf - snobský sport nebo sport pro všechny? - diplomová práce , Martin Šperl
Golfová hřiště v kontextu posuzování vlivů na životní prostředí - diplomová práce, Ing. Alice Levá
Golf a mapování
Golfová hřiště na území České republiky jsou na veřejných mapách zaznamenány většinou jako oblast pro hraní golfu. Často však bez konkrétních detailů hrací plochy. OSM ve své nabídce mapových prvků má kompletní sadu pro mapování golfových hřišť. Z toho vyplývá, že mapování golfových prvků je v OSM možné.
Golfové kluby hráčům samozřejmě předloží vlastní mapu hřiště, ale veřejná a ucelená informace ke všem golfovým hřištím buď zcela chybí, nebo není přesná a úplná.
Také golfová hřiště, podobně jako všechny jiné prvky v krajině, podléhají změnám v čase. Golfové kluby se snaží své hřiště rozvíjet, udržovat a měnit tak, aby co nejlépe poskytovalo herní zážitek. Mohou se měnit tvary a proporce jednotlivých jamkových tras, někde přibyde nebo ubyde stromový porost, vznikají zpevněné golfové stezky a rozšiřují se i pískové bunkery. Přesto se dá říci, že plán golfového hřiště zůstává z větší části bez změn. Každý klub svou herní plochu zachovává i proto, aby byla srozumitelná pro hráče hrající mezinárodní turnaje. Větší změny hřiště jsou velminákladné a hřiště je mimo provoz.
Když se podíváte na mapu ČR, tak golfová hřiště vznikají nejvíce kolem velkých měst, nebo v blízkosti atraktivních turistických destinací. Je to jednoznačně komerční objekt, který má za cíl zaujmout hráče a nabídnout jim nejlepší zážitek ze hry, komfort a zázemí. To vše také golfoví hráči očekávají. Mnohdy se vydávají na golfovou turistiku. Je to plánovaná tour po více golfových hřištích, kde tráví čas, využijí místní ubytovací služby a občas i navštíví blízké okolí. Jejich hlavním cílem však zůstává golf.
Až budu mít nějaké zajímavé příklady mapování golfového hřiště, rád je sem doplním.
A nyní už přejděme k hlavnímu tématu. Vznik a provoz golfových hřišť má několik negativních dopadů na životní prostředí.
Negativní dopady na přírodu
Ztráta přirozených přírodních stanovišť Golf vyžaduje nejvíce plochy v poměru na jednoho hráče, více než jakýkoli jiný sport. Výstavba golfových hřišť vede k zásadním změnám krajiny. Původní druhy rostlin a živočichů jsou nuceny opustit své dosavadní životní prostředí.
Jde například o částečné, nebo úplné odlesnění pozemku, na kterém je zcela odstraněn podrost a křovinné patro. Někde zůstávají zachovány jen solitérní stromy, nebo jsou dosazovány nové. Mnohdy druhy stromů, které jsou v této krajině cizí. (Šlechtěné odrůdy jehličnanů, listnaté stromy dovezené ze zahraničí…) Pod stromy je nadále udržovaný trávník, v případě opadavých stromů je pravidelně odstraňovaný opad listí, které by na zemi dělalo přirozenou ochranu půdy a přirozený habitat pozemního hmyzu a drobných živočichů.
I změna z obyčejné louky, nebo rozvolněné krajiny na golfové hřiště znamená redukci biodiverzity. Obyčejná louka spásaná skotem, občas sečená, nebo nesečená horská louka, dokáže udržet bylinné patro v relativně stabilní rovnováze. Jakmile zde vzniká hrací plocha navžená podle architekta, proběhnou změny. Ať už ve tvaru terénu, kdy jsou projektovány terénní nerovnosti, nebo naopak nerovnosti srovnány, tak i ve výběru a co největší redukci travin. Pro exponovaná místa se vybírají pouze nejodolnější travní druhy, které přežijí časté sekání na minimální výšku.
Golf u Řebíčka zničil vzácnou přírodu. Pokuta? 50 tisíc - Aktuálně.cz 8. 5. 2011
Znečištění vody a půdy Pro udržení jednodruhové a celistvé trávy na golfových hřištích je potřeba používat velké množství umělých hnojiv, herbicidů, fungicidů a pesticidů. Tyto chemikálie mohou kontaminovat blízké povrchové vodní zdroje i spodní vodu a ovlivnit rostliny, zvířata, potoky a řeky.
Chemické látky se musí aplikovat na plochu hřiště pravidelně, každý rok. Na konkrétních místech, kde je jakýkoliv porost nežádoucí, bývá používaný totální herbicid. Rezidua chemických přípravků mohou mít přímý vliv na další organismy v přírodním potravinovém řetězci. Pro zatěžovaná místa jsou používány v krajině i umělé trávníky, které postupně prorostou živou travou. Pak je nutné trávu sekat a při sečení trávy vzniká riziko, že se z umělého trávníku uvolní drobné části umělé hmoty a dostanou se dále do půdy.
Pískové bunkery jsou typický prvek každého golfových hřišť po celém světě. Přestože hřiště je budováno v krajině, kde není žádné přirozeně odkryté pískové podloží. Písek je tedy na místo zvlášť dovezen a umístěn do vybagrované jámy. Proto, aby písek působil co nejvíce esteticky, používá se světlý materiál s co nejvyšší odrazivosti, a nejnižší složkou organických látek. I přes pravidelnou péči pískový bunker může zarůst travou, proto jsou jeho okraje i povrch pravidelně ošetřovány totálním herbicidem. Při intenzivnějším zanesení písku půdou je obsah celého bunkeru komplet vyměněn. Dá se tedy říci, že tato část hřiště je udržována jako zcela neživý kus krajiny. Nedokáží v něm žít ani pískumilovné organismy. Může se dokonce stát nechtěnou pastí pro drobná zvířata, která se nemohou dostat z písečné jámy, v létě navíc přehřáté sluncem.
Znečištění může být i samotným výskytem golfových míčků v krajině. Byl popsán případ ze zahraničí, kdy bylo běžnou praxí golfistů odpalování míčků na Driving range směrem do moře, nebo do vodní plochy. Golfové míčky nikdo nesbíral, až vytvořily intenzívní environmentální zátěž pobřežních vod. Mořský příboj s míčky ve vodě pohyboval tak, že systematicky likvidoval život na mořském dně.
Podle americké golfové asociace se na golfových hřištích jen v USA ztratí až 300 milionů míčků ročně - Quora
Změna vodního cyklu a spotřeba vody Golfová hřiště vyžadují velké množství vody pro udržení zelené trávy, přinejmenším v odpalištích a jamkovištích. To je obzvláště problematické v oblastech i běžně náchylných k vysychání.
Další voda je potřeba v umělých vodních plochách, které vznikají i na místech, kde žádný přirozený zdroj vody není. Golfovému klubu nezbývá, než vodu čerpat z hlubinných studní, anebo dovážet v cisternách a přečerpat do umělých rybníčků. Kolem umělých vodních ploch většinou nejsou stromy, které by zastiňovaly hladinu a snižovaly výpar vody. Na březích je pravidelně odstraňováno rákosí a vodní rostliny. Byly případy, kdy do vodních nádrží byly aplikovány chemické látky omezující růst vodních řas. Tím se bohužel likviduje i další vodní život včetně hmyzu a vodních živočichů. Na hřištích bývají zatrubněny menší vodní toky, odvodněny mokřady, zasypány strouhy, nebo přesměrovány potoky tak, aby vedly do nově vzniklých vodních nádrží.
Firma dostala pokutu za nepovolené zavlažování golfového hřiště - Ekolist, 13.3.2019
Ztráta biodiverzity: Golfová hřiště jsou často umístěna v krásných přírodních scenériích, ale jejich výstavba a intenzívní údržba může vést ke snížení biodiverzity v těchto oblastech. Některá hřiště jsou na území CHKO nebo v přímé blízkosti CHKO, kde se mohou vyskytovat chráněné rostliny a živočichové, například endemičtí motýli.
Intenzívní péčí o úpravu hřiště bývá snížen nebo ohrožen výskyt zranitelných organismů, nebo prostě z této oblasti zcela zmizí. Pro provozovatele golfových klubů jsou nevítaní i drobní zemní živočichové, kteří si kopou nory, nebo vytváří krtiny. Je časté, že proti krtkům, hrabošům, myším i králíkům jsou jimi nachystány jedové návnady, nebo pasti. Ty se mohou stát sekundárním ohrožením i pro chráněné dravce, nebo další zvířata v potravním řetězci. Tato krajina je pak zákonitě více náchylnější na lokální výskyt parazitních jevů, chorob travin, které by v rozmanité krajině vůbec nevznikly.
Změna odolnosti krajiny: Golfová hřiště mění přirozenou krajinu na uměle upravené plochy, což může vést k erozi půdy a znečištění vody v důsledku odtoku narušených sedimentů. Necitlivé zásahy do půdního profilu vytváří zářezy, nebo převrácení přirozeného sledu vrstev půdy a tím mohou definitivně změnit nosnou kapacitu prostředí. Půda může méně přijímat vodu, nebo naopak více, než byl původní stav. To narušuje rovnováhy a dává příležitost ke vzniku dalších zřetězených událostí. V okolí může dojít k rozšíření nebo přemnožení invazívních organismů, které nemají přirozené nepřátele. Krajina může ztratit samočistící schopnost. Někdy bývá část golfového hřiště oddělena plotem, nebo zelenými ploty vytvořeny překážky, které snižují prostupnost krajiny pro divokou zvěř. Zvěř tak může mít zkomplikovaný přístup k vodním zdrojům, k přirozeným životním teritoriím, pokud je zvíře teritoriální.
Některé golfové kluby se snaží minimalizovat svůj dopad na životní prostředí různými opatřeními, aby vyhověly platným zákonům. Nicméně, celkový negativní dopad golfových hřišť na životní prostředí zůstává významný.
Zdroje:
- Environmental Impact of Golf Courses – Rain or Shine Golf
- Are Golf Courses Bad For The Environment? The Truth Revealed
- The Environmental Impact of Golf Courses Is Unsurprisingly Outrageous
- Sport 2050: How climate change could leave golf with a less than
- Why Golf Courses Are Bad for the Environment (and What You Can Do About It)
- Six Ways Golf Courses Hurt the Environment
- Can a golf course support biodiversity? - Sport Ecology Group
- 5 Environmental Impacts of Golf Courses - Environment Go!
- The Environmental Impact of Golf Courses & Their Benefits
- Research Confirms Environmental Value of Golf Courses
Co s tím?
Existuje několik opatření, které se dají použít na golfových hřištích:
Učinit k přírodě neohleduplný golf společensky nepřijatelným S pomocí podložených informací a důkazů upozorňovat na neudržitelné aspekty provozu golfových areálů. Dávat konkrétní důkazy o vlivu na krajinu. Dávat příklady a podněty jak totéž dělat lépe a šetrněji k přírodě.
Jsou golfová hřiště budoucností ochrany přírody? Záleží, kde vzniknou - Ekolist, 23.1.2024
Omezit látky poškozujících životní prostředí Snížení množství, nebo úplné vynechání chemických prostředků které zanechávají trvalé chemické stopy na povrchu i pod povrchem hřiště. Místo chemie eliminující v konkrétním místě nežádoucí rostliny se dá používat lokálně i horká pára.
Šetřit spotřebu vody Golf vyžaduje velké množství vody pro péči o hřiště, a proto je důležité implementovat strategie pro šetření vodou. To může zahrnovat použití inteligentních zavlažovacích technologií a výběr rostlin odolných vůči suchu. Užitečné je i využití přírodních čističek odpadní vody z místa a následné vracení vyčištěné vody do ekosystému.
Větší pokrytí stromy a vytváření větrných bariér může snížit vysychání povrchu zejména v důsledku větru. Koruny vzrostlých stromů zpomalují proudění vzduchu u země, vytváří stín a efektivně zachycují vzdušnou vlhkost v různých ročních i denních obdobích. Krajina by měla pracovat s vodou tak, aby zde voda zůstávala a nebyla zbytečně odváděna pryč.
Zlepšit energetickou účinnost zařízení může pomoci golfovým hřištím ušetřit peníze, pokud investují do úsporných technologií. Týká se to jak důsledné využívání obnovitelných zdrojů energie pro servisní stroje a golfové vozíky, ale i výstavba energeticky úsporných budov souvisejících se službami golfového hřiště. Je možné kombinovat solární zdroje s větrnými zdroji, nebo tepelnými čerpadly.
Ekologicky zpracovávat odpady: Správa odpadů je důležitou praxí pro jakékoliv golfové hřiště. To může zahrnovat recyklaci a kompostování organických odpadů, především sečené trávy, shromážděného listí a ořezaných dřevin z hrací plochy. Vzniklý kompost je možné vracet do půdy místo umělých hnojiv. Ať už přímo na hřišti, nebo na jiné zemědělské půdě. Rozhodně užitečnější, než spalování biohmoty v elektrárnách na biomasu. Se zázemím souvisí i dopravní obslužnost, parkoviště a rizika znečištění odpadky z prostor pro návštěvníky, nebo motorovými kapalinami. Kvalitní správa odpadu zvyšuje prestiž golfového klubu.
Podporovat biodiverzitu krajiny: První volba by měla být výběr lokality, která se vznikem golfového hřiště obohatí a zkulturní. Mohou to být bývalé průmyslové pozemky, rekultivované výsypky a povrchové doly. Ovšem ne každý brownfield je z pohledu biologické rozmanitosti chudý. Příklady ukazují, že opuštěné brownfieldy mívají vyšší obsazenost rostlinami i živočichy, než vnitřní města, nebo intenzivně obdělávaná zemědělská krajina.
Výběr původních rostlin pro úpravu blízkého okolí hřiště může zachovat vyšší biodiverzitu a zlepšit zdraví půdy. Golfový plán by měl být navrhován krajinným architektem s citlivým přístupem, který zohlední místa vhodná pro bohatší obsazení rostlinami i konkrétními stromy.
V areálu tak mohou být pásy a biokoridory s různými bylinami, keři a stromy, ale i suchými poldery nebo kamenitými skalkami, které dávají prostor pro život mnoha živočichům, od hmyzu přes obyvatele polí a luk až po zpěvné ptáky a dravce. Hřiště by mělo nenásilně zapadat do místní krajiny. Pokud možno nevytvářet příliš velké tepelné ostrovy, umožnit volný pohyb divoké zvěři, nevytvářet pasti ani riziková místa pro zvěř.
Další čtení ze světa:
- Pioneering Sustainable Practices in Golf Course Renovation with Green
- Sustainable Golf Course, Sustainable Waste Management
- Sustainable Golf - R&A
- Milestone Reached in Golf Course Sustainability Study - USGA
- The Path to Sustainable Golf Course Maintenance: Optimizing Practices
A co s mapovými daty dál?
Mapování všech golfových hřišť v OpenStreetMap tedy může poskytnout nová, nebo strukturovaná data o celkové ploše golfových prvků, v konkrétní zemi. Tato data mohou být použita k přesnější analýze dopadu golfových hřišť na životní prostředí a krajinnou rozmanitost.
Kvalita dat o golfovém povrchu může být pochopitelně ovlivněna různými faktory, včetně intenzity zapojení komunity a přesnosti nahrávaných dat. Navíc, i když OSM může poskytnout cenná data, je také důležité zpracovat tato data současně s dalšími zdroji informací a metodami výzkumu při hodnocení dopadů golfových hřišť na životní prostředí. Bez základního mapování budou však analýzy prakticky nemožné, nebo jen velmi hrubé.
Analýza shromážděných dat z OSM může probíhat v rámci konkrétního studentského, nebo výzkumného projektu, jehož cílem je popsat stav, negativní vlivy a environmentální opatření krajiny s golfovým hřištěm. Může vzniknout metodika a doporučení jak harmonizovat ochranu přírody s provozem golfových hřišť. To vše může zapadat do naplňování Cílů Udržitelného Rozvoje SDG 2030.
Pokud vás téma zaujalo, pomozte mapovat golfová hřiště. Další čtení a zdroje:
- Mapping golf courses with Mapillary and OpenStreetMap
- Using Open Street Map Data in Environmental Exposure Assessment Studies
- Can a golf course support biodiversity and ecosystem services?
- The role of golf courses in biodiversity conservation and ecosystem
- Urban golf courses are biodiversity oases. Opening them up puts that at risk .
- A Framework for Biodiversity Assessment of Golf Courses
- Recognising and Protecting Biodiversity at Golf Courses: A FFGolf initiative
- Using OpenStreetMap point-of-interest data to model urban change
- Utilizing geospatial information to implement SDGs
- Open Geospatial Data in Environmental Management: Context, oppotunities and challenges
- OpenStreetMap Golf Mapping - YouTube
- GitHub - leif81/osmgolf: Open Street Map Golf web app
- OpenStreetMap golf courses — European Environment Agency

Welcome to my fifth OpenStreetMap NextGen development diary.
This week has been mostly focused on GPS Traces 🛰.
🔖 You can read my other development diaries here:
https://www.openstreetmap.org/user/NorthCrab/diary/
🐙 This project is open-source and publicly available:
https://github.com/Zaczero/openstreetmap-ng
GPS Traces Demo
It’s best to experience the refreshed traces in a video form, so I prepared a short demo (no audio):
⏯️ https://files.monicz.dev/osm/traces-demo.mp4
For comparison, here’s how the same trace looks on the current website:
https://www.openstreetmap.org/user/bielebog/traces/11326871
You will quickly notice the super-fast upload speed and the new trace animations. If there’s something wrong with the file you attached, you will receive instant feedback on the upload page. One new feature is possibility to edit trace name. Previously, this feature has been hidden behind API 0.6.
One more planned feature is rendering the map behind the trace animation. Now that the system works on individual coordinates, it will be fairly easy to implement. Traces without a human-understandable point of reference are not as useful as they could be.
Unified Traces URLs
Let’s start with discussing the current URL routes.
- If you want to access a way, you visit
/way/<ID> - If you want to access a note, you visit
/note/<ID> - If you want to access a trace, you visit
/user/<USER>/traces/<ID>
Which is not consistent. OpenStreetMap-NG unifies this experience by introducing a new URL route: /trace/<ID>. All existing URLs remain backwards compatible and are automatically redirected.
Short-Term Development Plan
There’s just a few things left before reaching the core feature parity with the existing website. Those are the things I want to finish before inviting new contributors ツ.
- Elements sidebar (50% work in progress)
- User Diaries
- User Profiles
- Applications (OAuth) settings
Contributor Benefits
Last week I hinted towards the announcement of a contributor benefit. Today, I will talk shortly on 1 of 2 currently planned ideas, that will help the project grow and stay strong.
Firstly, who are the “contributors”? Those are the people who help the OpenStreetMap-NG project. For example: by testing the website, donating, contributing code, helping with localization, graphics and interface design, etc.. The scope is broadly defined, as people can contribute in many different ways!
Contributors joining before the project is officially accepted as the main OpenStreetMap website, will be able to become a member of the NextGen Founders invite-only community and receive a small badge on their user profiles. This feature is a part of the original announcement (under the name “Community Profiles”).
This is a time-limited benefit, that provides a unique thank-you to all people that help (and will help) making this project a reality. The 2nd benefit will be announced in some time in the future.
Project Sponsors 🏅
Here’s my weekly appreciation to the current project patrons. Thank you for believing and helping me do what I love :-)
Currently, the project is sponsored by 11 people!
Five private and three public donors on Liberapay, and three public on GitHub Sponsors.
If you can, please consider supporting the NG development:

Disclaimer
This project is not affiliated with the OpenStreetMap Foundation.
✔ Mini curso para a Defesa Civil (Brasil)
✔ Oficina sobre mapeamento de pontos de interesse (POI) com OpenStreetMap
✔ Special interview about Brazilian NSDI on the first anniversary of YouthMappers UFRJ
✔ Entrevista especial sobre a INDE no aniversário de 1 ano do YouthMappers UFRJ
✔ YouthMappers UFRJ receives the Women’s Participation Award!
✔ YouthMappers UFRJ recebe o Women’s Participation Award!
✔ Our participation in the Open Data Day YouthMappers at UFBA 2024
✔ Nossa participação no Open Data Day 2024 do YouthMappers at UFBA
✔ Web map do mapeamento colaborativo para redução de riscos e desastes (RRD)
✔ Web map of colaborative mapping for the Disaster Risk Reduction (DRR)
✔ Mapear POI no OpenStreetMap e exibir dinamicamente com uMap
✔ Mapping POI in OpenStreetMap and displaying dynamically with uMap
✔ V Olimpíada Brasileira de Cartografia incluiu o OpenStreetMap como parte de sua etapa prática
✔ V Brazilian Cartographic Olympiad included OpenStreetMap as part of its practical stage
✔ Geocodificação com OpenStreetMap
✔ Mapeamento humanitário e OpenStreetMap
✔ Nossa participação no State of the Map Brasil 2023
✔ Atualização dos dados populacionais dos municípios brasileiros no OpenStreetMap
Posted by Raquel Dezidério Souto on 15 April 2024 in Portuguese (Português).
IVIDES.org® realizou mini curso sobre mapeamento com OpenStreetMap voltado à redução de riscos de desastres
No dia 11 de abril de 2024, o Instituto Virtual para o Desenvolvimento Sustentável - IVIDES.org, na pessoa de sua presidenta, Dra. Raquel Dezidério Souto, promoveu um mini curso sobre mapeamento colaborativo com OpenStreetMap e voltado à redução de riscos de desastres (RRD). O treinamento foi oferecido aos(às) servidores(as) de defesas civis de diversos estados do Brasil, como parte de um curso sobre logística para desastres.
Como parte dos documentos, foi incluída uma lista preliminar de feições relacionadas à RRD e as etiquetas correspondentes. Todos os arquivos da apresentação podem ser encontrados neste LINK.
![]()
کافی نت ایفل
Having both GoPro Hero11 and Max360, I was curious whether there would be any use from running both cameras at the same time. While Max 360 captures all around, would Hero 11 possibly have better resolution, which could be useful for streetview platforms like Mapillary and Panoramax, thus also providing additional detail for OSM mapping?
Here’s the same object - a surveillance camera - from both action cameras. Hero11 is even a little bit further away.
Max360:

Hero11:

As can be seen, Hero11 does offer notably better resolution, which could be crucial with signs and other objects - thus it does make sense to collect imagery with two cameras like that at the same time.
My first diary entry in thirteen years, and so much has changed on OSM. The editing tools have come on so much, and there is now an incredible level of detail, even in the rural town I’m living in now. I think I need to go back to the documentation to refresh my memory and look at adding all the things missing in my neighbourhood.
Why is there no Arabic language on maps?لماذا لاتوجد اللغة العربية في الخرائط